Skalierbare Gesamtfahrzeugsimulation
Herausforderungen
Die Gesamtfahrzeugsimulation ein effizientes Mittel, um Kosten bei der Entwicklung von Fahrzeugen zu sparen. Sie wird durch die zunehmend vorangetriebene Entwicklung von Hybrid- und Elektrofahrzeugen immer bedeutender. Da sich durch die neuen Antriebskonzepte eine Vielzahl neuer Antriebsstrangtopologien (z.B. Parallelhybrid, serieller Hybrid oder Mehrmaschinen-Antriebe) ergeben, ist es für eine umfassende Bewertung und Optimierung der unterschiedlichen Konzepte notwendig, flexible und vor allem skalierbare Modelle zu haben.
Ziele
Wir entwickeln skalierbare Modelle, durch deren Flexibilität und Schnittstellendefinition jede denkbare Antriebsstrangtopologie nachgebildet und bewertet werden kann. Insbesondere soll durch die Verbindung von Skalierbarkeit der Modelle und Optimierung die optimale Antriebskonfiguration für ein gegebenes Fahrzeug gefunden werden.
Teilaspekte
Skalierbare Modelle
Die objektorientierte Modellierung erlaubt es uns, das Gesamtfahrzeugmodell möglichst flexibel zu gestalten und modular aufzubauen. Zusammen mit unseren Kooperationspartner haben wir eine umfassende Bibliothek an Komponentenmodellen erstellt, um komplette Fahrzeuge in der Simulation nachzubilden. Unter anderem sind darin enthalten:
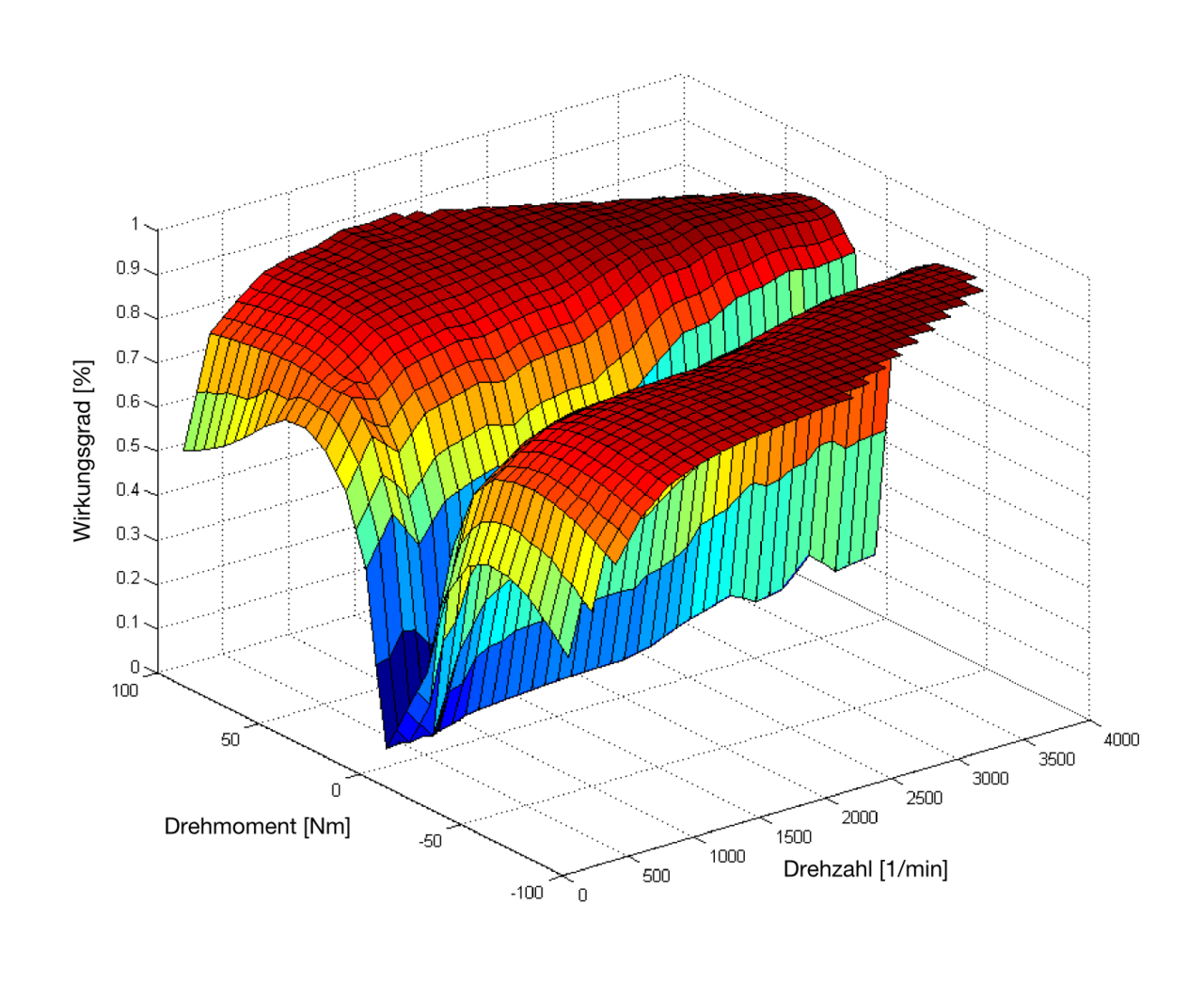
- Asynchronmaschine (axial und radial skalierbar)
- Synchronmaschine (axial und radial skalierbar)
- Elektrischer Energiespeicher
- Brennstoffzelle
- Leistungselektronik
- Verbrennungsmotoren
- Getriebe
- Nebenaggregate
Zur Verifikation und Parametrierung der erstellten Modelle betreiben wir mehrere Prüfstände (Link), die eine hohe Modellqualität sicherstellen. Die skalierbaren Modelle werden von uns ständig weiterentwickelt und die Grenzen der Skalierbarkeit ausgedehnt.
Entwicklung von modularen, objektorientierten Modellen
Wir entwickeln Modelle, die durch ihre klar definierten und abgestimmten Schnittstellen im Antriebsstrang „frei“ positioniert werden können. Beispielsweise kann das Getriebe nicht nur nach der elektrischen Maschine sondern auch zwischen Verbrennungsmotor und elektrischer Maschine platziert werden. Diese Flexibilität ermöglicht eine Vielzahl von Untersuchungen und Vergleichen der unterschiedlichen Topologien.
Vorwärts- und Rückwärtssimulation
Sowohl die Vorwärtssimulation (Nachbilden eines realen Fahrers im Modell und die Berechnung von den antreibenden Komponenten zum Rad) als auch die Rückwärtssimulation (Berechnung vom Rad ausgehend bis hin zu den antreibenden Komponenten) haben Vor- und Nachteile. So ist die schnellere Rückwärtssimulation für die Optimierung von Antriebssträngen geeigneter, wohingegen die Vorwärtssimulation die Verifikation der Teilmodelle erleichtert. Daher entwickeln wir anhand einer Vorwärtssimulation Teilmodelle, die eine genaue Kenntnis der physikalischen Abläufe vermitteln und übertragen diese und notwendige Kontrollmechanismen in eine Rückwärtssimulation, welche die Optimierung ermöglicht.
Optimierung
Wir entwickeln eine Methodik, durch die bei der multikriteriellen Optimierung des Antriebsstrangs der Einfluss der einzelnen Komponenten und ihrer Größe sichtbar wird. Außerdem soll diese Methode die Analyse der Abhängigkeiten zwischen den verschiedenen Komponenten ermöglichen. So ist es bei parallelhybriden Fahrzeugen beispielsweise sehr entscheidend, wie groß der elektrische Energiespeicher gewählt ist. Ist er zu klein, kann die Möglichkeit des elektrischen Fahrens nicht adäquat ausgenutzt werden. Ist er zu groß, verursacht er nur unnötiges Gewicht. Dieses „zu groß“ und „zu klein“ hängt dabei sehr stark von der Dimensionierung der elektrischen Maschine, des Verbrennungsmotors und nicht zuletzt des Fahrzeugs ab.